조종석에 로봇을 앉혀 비행기를 모는 시대가 현실로 다가오고 있다.
KAIST가 개발한 인간형 조종사 로봇 ‘파이봇(PIBOT)’이 기존 항공기를 개조하지 않고 비행 임무를 수행하는 기술로 세계 최고권위 로봇 학술지 최우수논문상을 받았다.
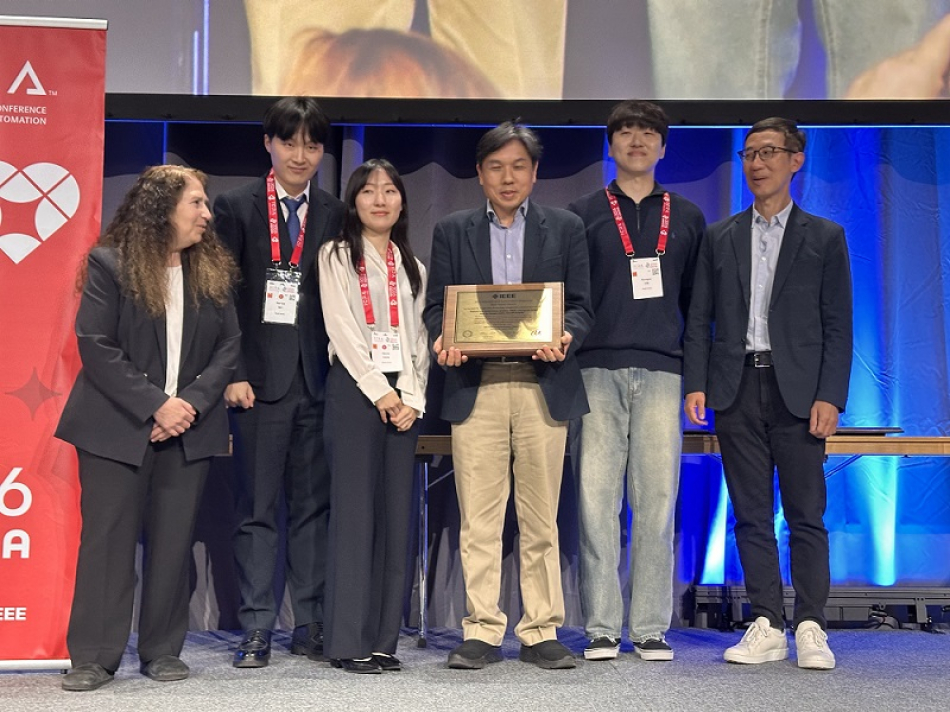
KAIST 전기및전자공학부 심현철 교수팀이 제출한 파이봇 기반 항공기 자율조종 프레임워크 논문은 국제전기전자공학회(IEEE) 산하 로보틱스 및 자동화 매거진(IEEE RAM)의 2025년 게재 논문 가운데 최우수논문상(Best Paper Award) 수상작으로 선정됐다.
이번 수상은 국내 독자 기술로 개발한 인간형 조종사 로봇이 세계 최고 수준의 로봇 연구 성과로 인정받았다는 점에서 의미가 크다.
IEEE RAM은 IEEE 로보틱스 및 자동화학회가 발행하는 권위 있는 학술지로, 로봇공학과 자동화 분야의 최신 연구 성과와 산업 동향을 다루며 실제 산업 현장 적용 가능성이 높은 연구를 엄격하게 심사한다.
심 교수팀의 파이봇은 단순히 걷거나 물건을 옮기는 수준을 넘어 실제 조종사가 수행하는 전문 업무를 대신하도록 설계됐다.
파이봇은 사람을 위해 만들어진 기존 항공기 조종석에 그대로 탑승해 조종간과 스위치, 레버, 페달 등을 직접 조작하기 때문에 항공기를 별도로 개조할 필요 없이 기존 조종석 환경에서 비행 임무를 수행할 수 있는 것이 특징이다.

현재 항공기를 무인화하려면 자동비행장치를 활용하거나 새로운 무인기를 개발해야 한다.
그러나 자동비행장치는 일부 기능만 자동화할 수 있고, 무인기 개발은 막대한 비용과 시간이 필요하다.
반면 파이봇은 인간 조종사를 대신해 기존 조종석에 앉아 항공기를 조작하는 방식이어서 다양한 항공기에 즉시 적용할 수 있다.
심 교수팀은 이번 연구에서 생성형 인공지능과 인간형 로봇을 결합해 항공기 조종에 필요한 전문지식을 실제 행동으로 연결하는 기술을 구현했다.
파이봇은 항공기 매뉴얼과 체크리스트, 비상 절차 문서를 읽고 내용을 분석한다.
계기 확인, 항공기 상태 판단, 조작 대상 식별, 조작 순서 결정 등의 과정을 거쳐 실제 조종 행동을 수행한다.
관제사와의 교신 절차까지 처리할 수 있도록 설계됐다.
연구팀은 이를 항공기 시뮬레이터 환경에서 검증, 실제 경량항공기 KLA-100 조종석에서도 초기 조작 실험을 수행해 기술 가능성을 확인했다.

심 교수팀은 현재 실제 조종사와 유사한 체격과 관절 구조를 갖춘 2단계 파이봇을 개발 중이다.
또 항공기뿐 아니라 자동차, 선박, 중장비 등 다양한 이동체 조종 분야로 기술 적용 범위를 확대할 계획이다.
심 교수는 “세계 최초로 제안한 조종사 로봇 기술이 세계 최고 수준의 연구 성과로 인정받아 뜻깊다"며 ”인간형 로봇이 실제 환경에서 사람을 돕고 복잡한 시스템을 안전하게 운용할 수 있도록 연구를 더욱 발전시키겠다"고 말했다.
이번 논문은 민성재·강규리·김형주 박사과정생이 공동 제1저자로 참여했다.
한편, 이번 연구는 국방과학연구소 미래도전국방기술 연구개발 과제로 선정돼 수행 중이다.
이재형 기자 jh@kukinews.com






![[쿠키과학] ‘DNA 서열 바꿔 수소 생산 높인다’… KAIST, 전기촉매 설계법 개발](/data/kuk/image/2026/06/06/kuk20260606000023.253x158.0.jpg)