










[쿠키뉴스] 송금종 기자 = 건국대 스마트운행체공학과 박훈철 교수가 8월 ‘이달의 과학기술인상’ 수상자로 선정됐다.
과학기술정보통신부와 한국연구재단은 우수한 연구개발 성과로 과학기술 발전에 공헌한 사람을 매달 1명씩 선정, 포상한다.
박 교수는 장애물과 충돌해도 추락하지 않는 장수풍뎅이 날개와 비행 원리를 규명하고 이를 모방한 날갯짓 비행로봇을 개발했다.
우주 저밀도대기에서 비행 가능한 미래 항공우주기술 기반을 마련했다는 평을 받는다. 박 교수는 이 공로로 과기정통부 장관상과 상금 1000만원을 받는다.
낮은 대기 밀도에서 비행이 가능한 곤충 모방 로봇을 개발하려는 시도가 많았다.
꼬리날개가 없는 곤충 비행방법은 기술 구현이 어려워 장시간 비행에 성공한 사례가 드물었다.
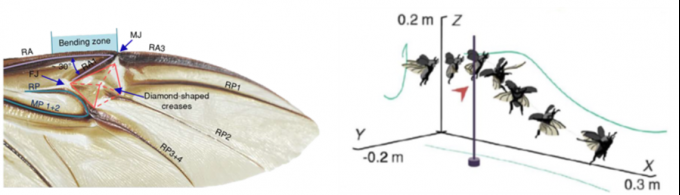
뒷날개 중간을 접었다 펼쳐서 비행하는 풍뎅이는 충돌에도 안정된 비행이 가능하지만 뒷날개가 완전히 펼쳐지는 과정이 명확하게 규명되지 않았다.
박 교수는 초고속 카메라 촬영으로 장수풍뎅이 뒷날개가 처음 날갯짓으로 발생하는 공기력과 관성력으로 완전히 펼쳐지는 사실을 밝혔다.
비행 중 장애물 충돌로 뒷날개가 접혀도 중앙부 충돌 에너지 흡수로 짧은 시간 안에 다시 펼쳐져 비행을 계속할 수 있음도 입증했다.
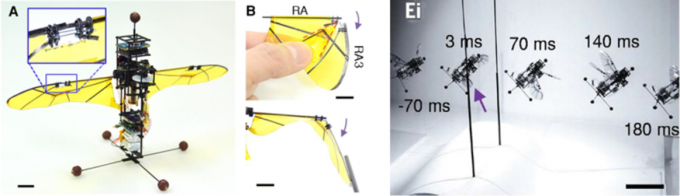
박 교수팀은 이 원리를 적용해 날개에 충돌 에너지 흡수 장치를 부착한 곤충 모방 날갯짓 비행로봇 ‘KU비틀’을 개발했다.
날개가 장애물과 충돌할 때 날개가 접히면서 충격을 완화하고 다시 펼쳐져서 비행하는 방식을 입증했다.
연구결과는 지난해 12월 국제학술지 사이언스 온라인판에 게재됐다.
박 교수는 “이번 연구는 장수풍뎅이 날개 충돌 에너지 흡수 원리를 규명하고 독자 기술로 구현한 데 의의가 있다”며 “저밀도 대기 비행이 가능하고 좀 더 비행효율이 높은 곤충 모방 비행로봇 연구를 계속할 계획”이라고 밝혔다.
박 교수는 △62년생 △서울대 항공공학 졸 △미국 메릴랜드 주립대 항공우주공학 박사 △건국대 교수 △현 저널 어드밴스드 로보틱스 시스템 부편집장 △전 대한기계학회 바이오공학부문 회장 △전 국제지능무인시스템협회장 △현 저널 바이오닉 엔지니어링 부편집장
song@kukinews.com





